- 01
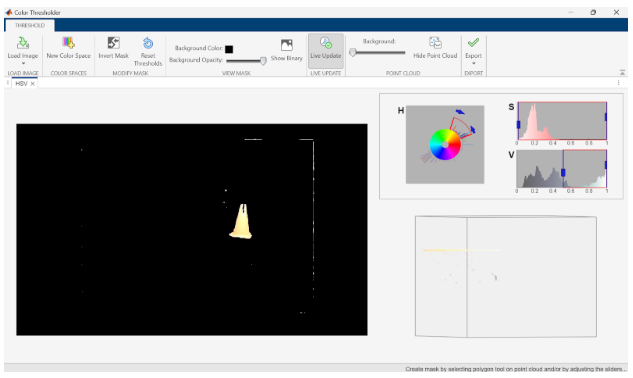
Color Segmentation: Programmed an automated HSV thresholding algorithm to isolate target colors. Explicitly handled hue wrap-around logic mathematically to ensure robust target detection without data loss.
- 02
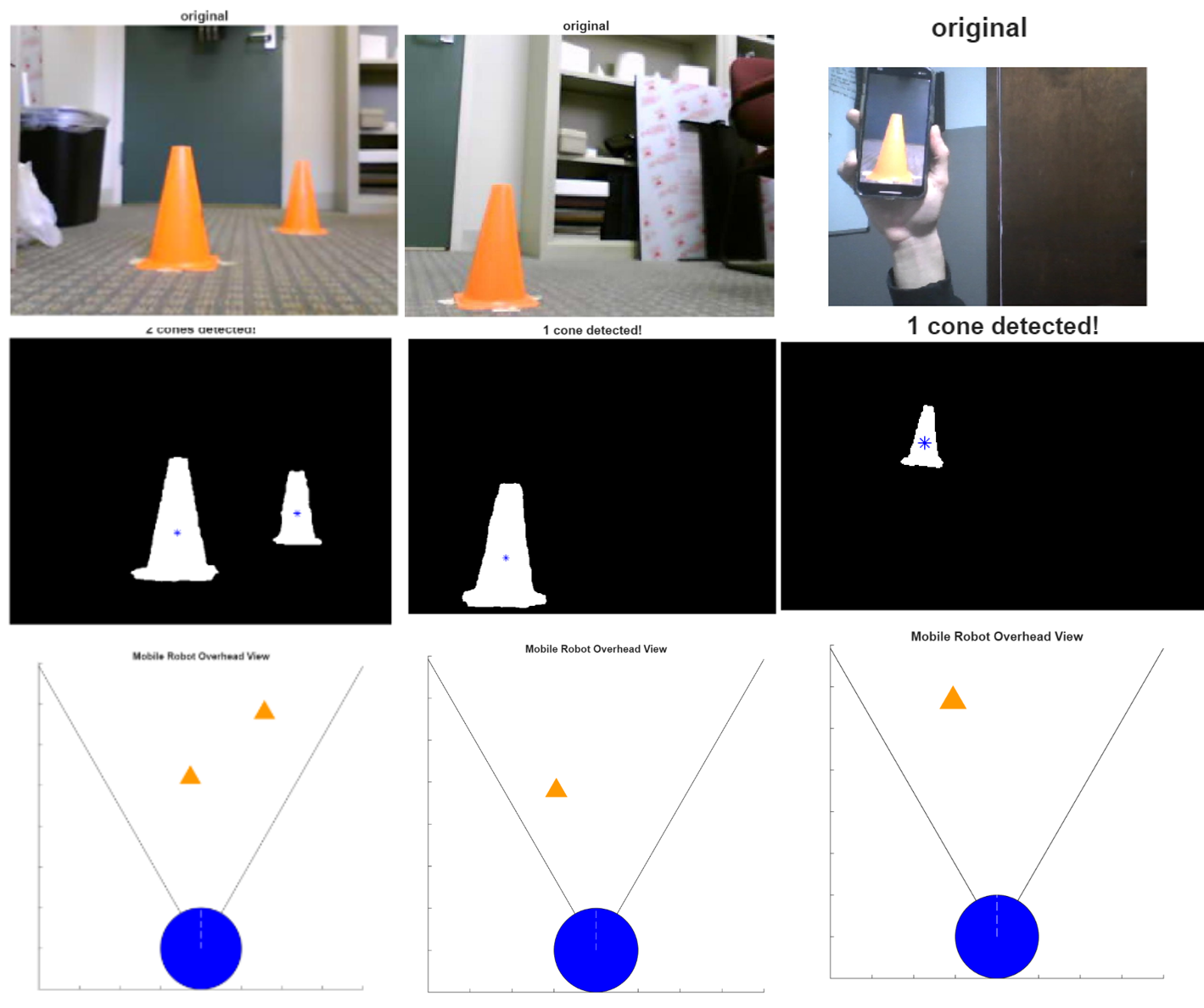
Blob Analysis & Filtering: Implemented morphological operations to clean raw binary masks, effectively removing pixel noise and filling internal gaps. Utilized connected component labeling to extract precise target centroids and pixel areas.
- 03
Geometric Transformation: Formulated mathematical mappings to convert 2D pixel coordinates into real-world spatial estimations. Calculated the target's angular offset based on the camera's 60° horizontal field of view and estimated relative proximity.
- 04
System Validation: Validated the detection algorithm against static training datasets, unseen test environments, and dynamic webcam feeds, proving the system's reliability.