- 01
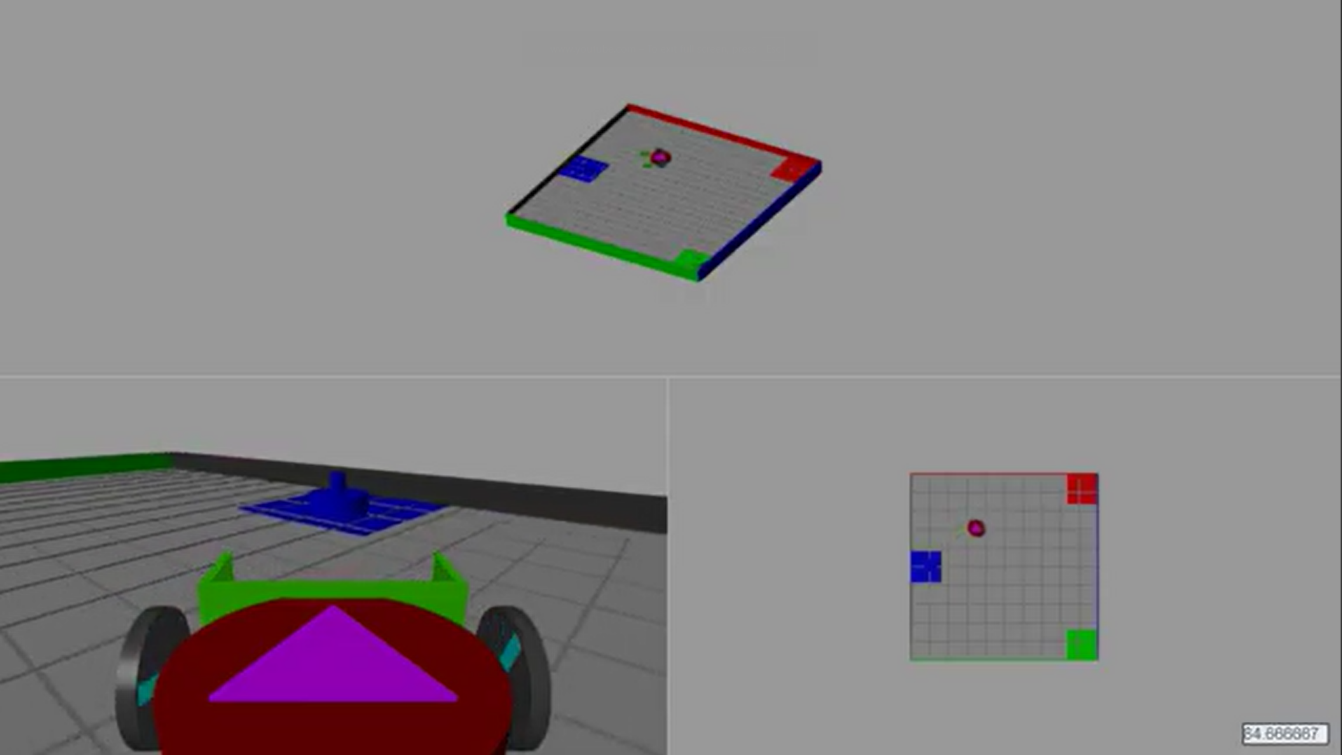
Stateflow Control Architecture: Developed modular, state-based decision logic using Simulink Stateflow to autonomously transition the robot between object search, approach, controlled pushing, obstacle avoidance, and return-to-origin behaviors.
- 02
Sensor Integration & Odometry: Processed simulated feedback from forward-facing object color detectors, distance proximity sensors, and wheel odometry to dynamically adjust differential drive wheel commands.
- 03
System Integration & Tuning: Integration and systematic testing of the Stateflow control framework, iteratively tuning the logic to successfully mitigate failure modes like oscillatory behavior, incomplete object placement, and unintended wall collisions.
- 04
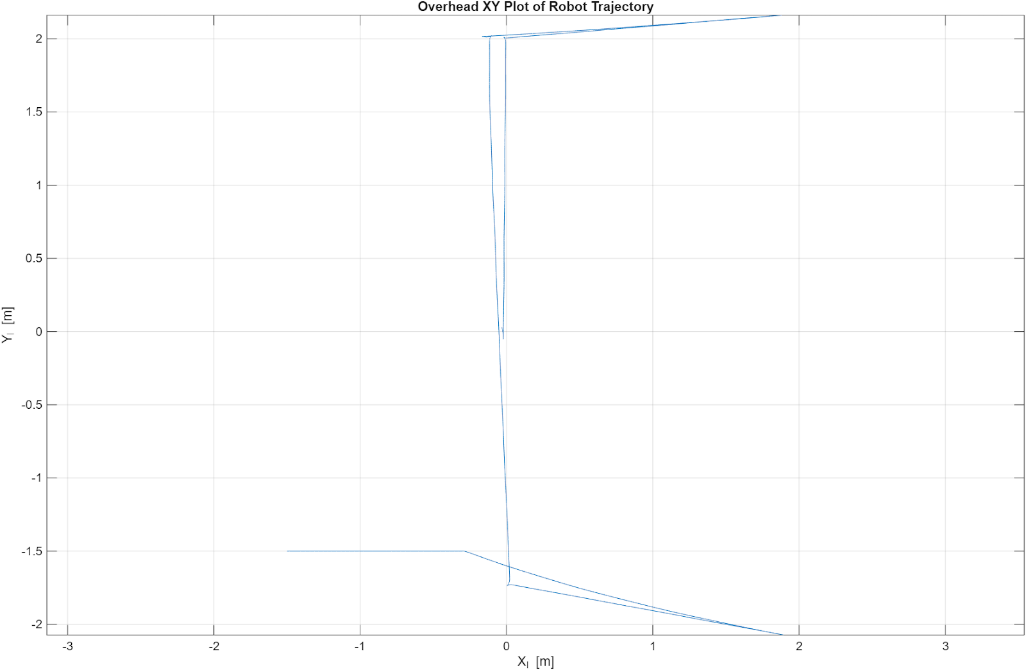
Robustness Validation: Validated the system's deterministic behavior across all six possible initial color-location permutations, proving reliable, collision-free task completion through extensive trajectory and orientation plotting.