- 01
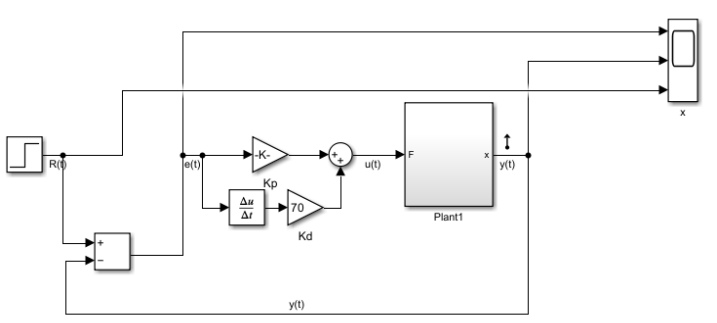
Mathematical Modeling & Verification: Derived the state-space representation of a coupled double spring-mass-damper system. Verified the mathematical model's accuracy by running comparative step-response simulations against the physical Simscape plant.
- 02
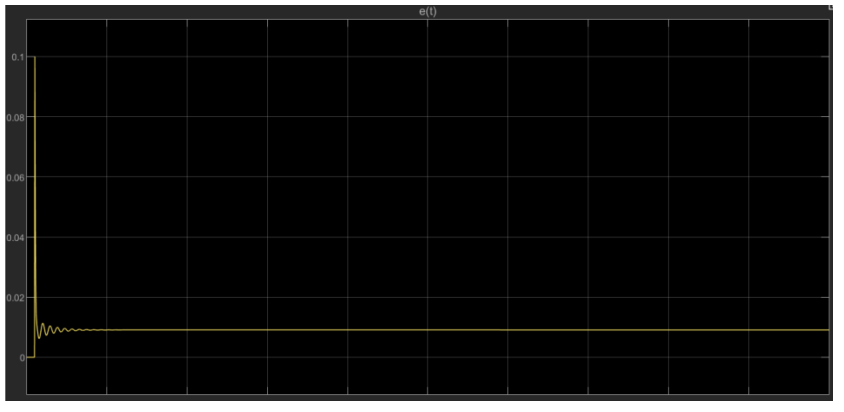
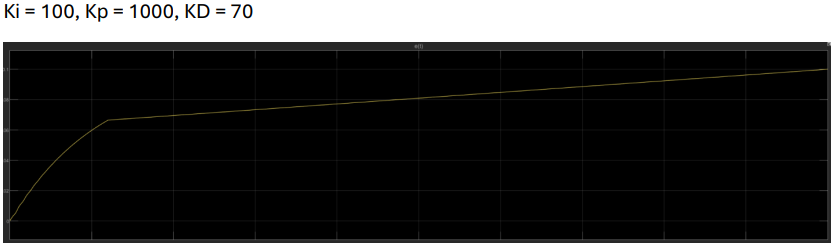
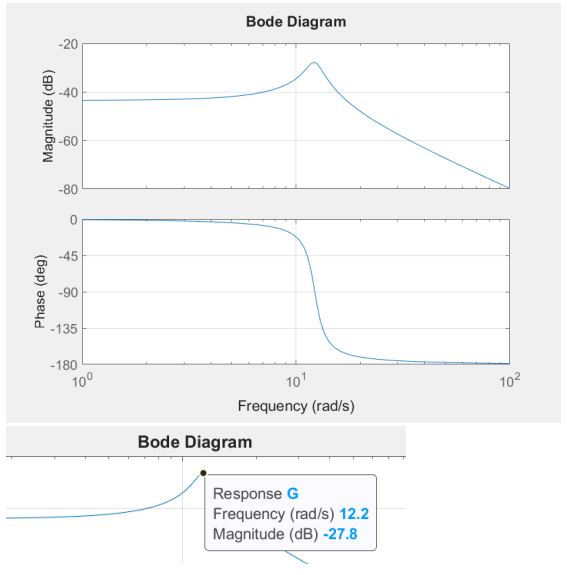
PID Control & Frequency Analysis: Analytically designed and iteratively tuned a PID controller to minimize steady-state error while managing the trade-offs between tracking accuracy and system damping. Evaluated the control system's tracking limits across varying input frequencies using Bode plots, successfully identifying the 12.2 rad/s cutoff frequency.
- 03
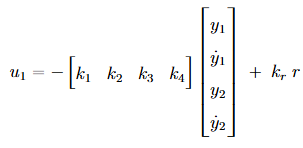
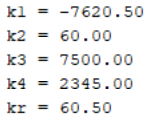
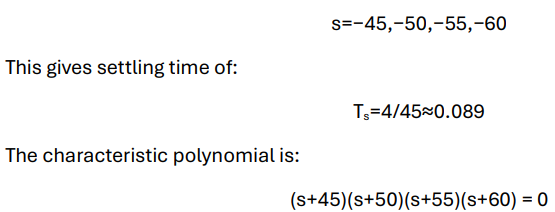
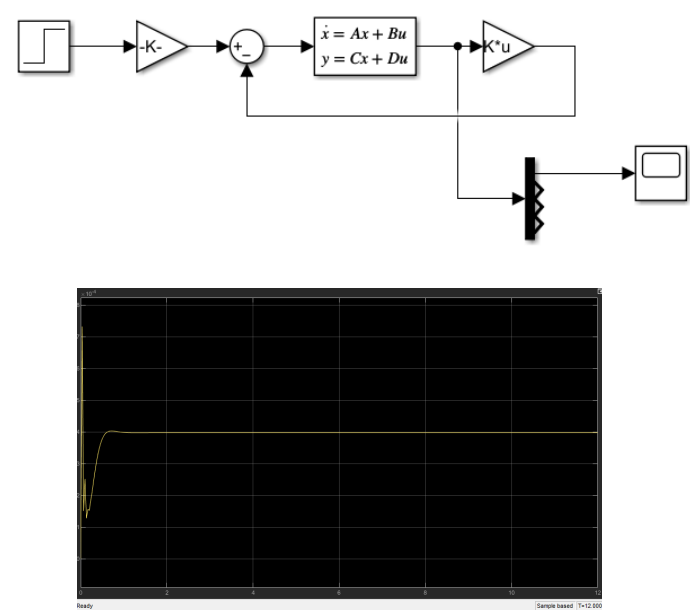
State-Feedback Control Implementation: Engineered a modern state-feedback controller using analytical pole placement (s = -45, -50, -55, -60) to enforce strict performance constraints. Calculated optimal gain matrices to achieve a rapid settling time of less than 0.1 seconds while ensuring critical damping.