Key Engineering Contributions
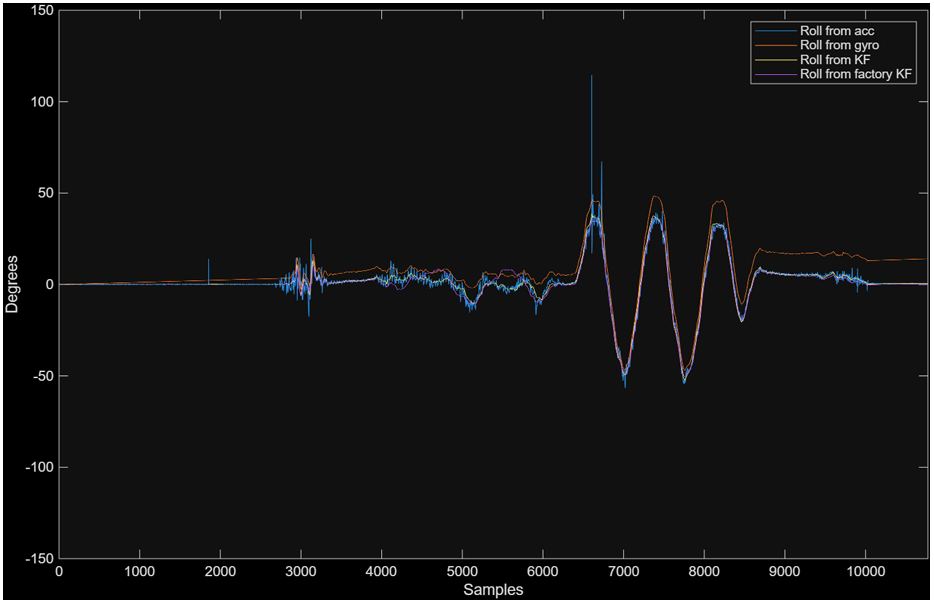
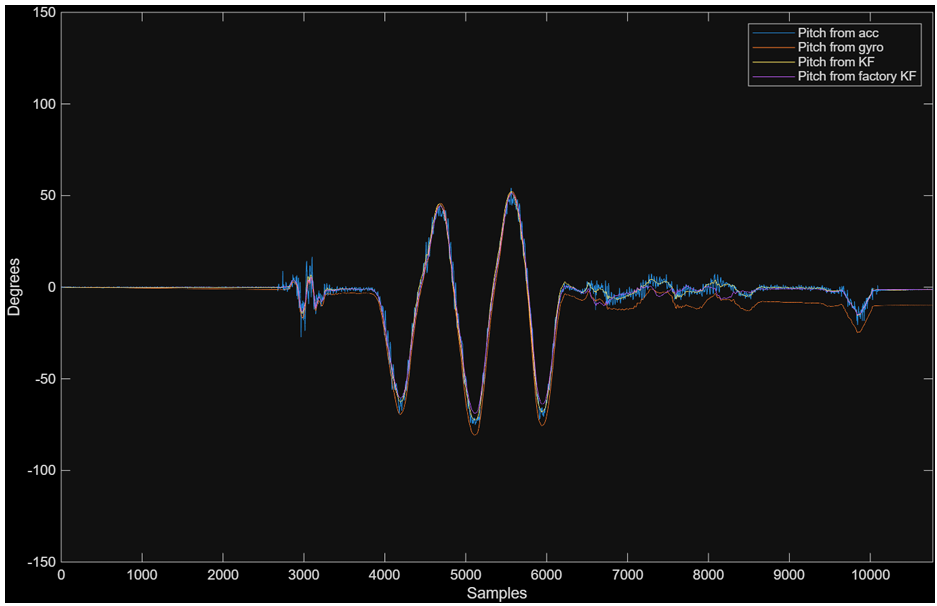
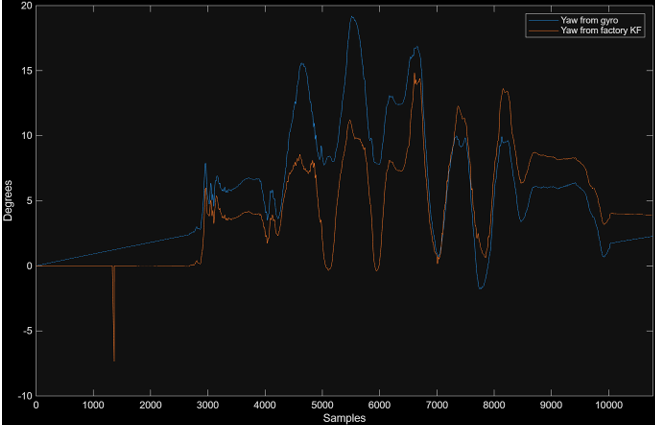
- 01Sensor Fusion: Processed raw angular velocity (gyroscope) and linear acceleration (accelerometer) data to independently estimate orientation angles.
- 02Kalman Filtering: Implemented a Kalman Filter algorithm to fuse the independent sensor readings, effectively mitigating gyroscope drift and accelerometer noise to produce a highly accurate, stable orientation estimate.
- 03Functional Calibration: Executed functional calibration procedures to compute and plot calibrated 3D coordinate axes directly from raw kinematic movement data.
Visual Documentation