Key Engineering Contributions
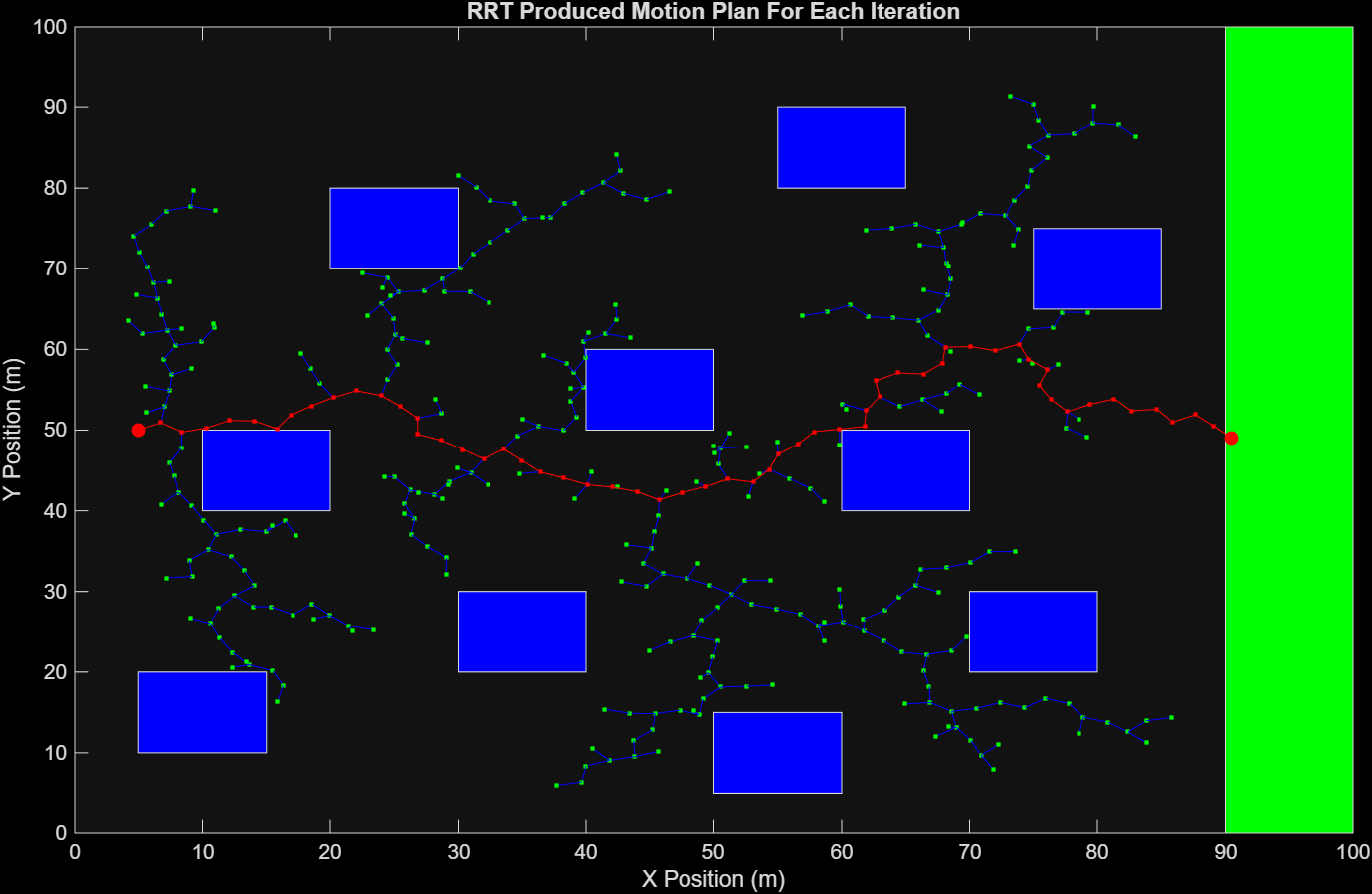
- 01Developed a complete RRT-based path planning algorithm, including nearest-neighbor search, bounded expansion, and collision checking for both nodes and path segments .
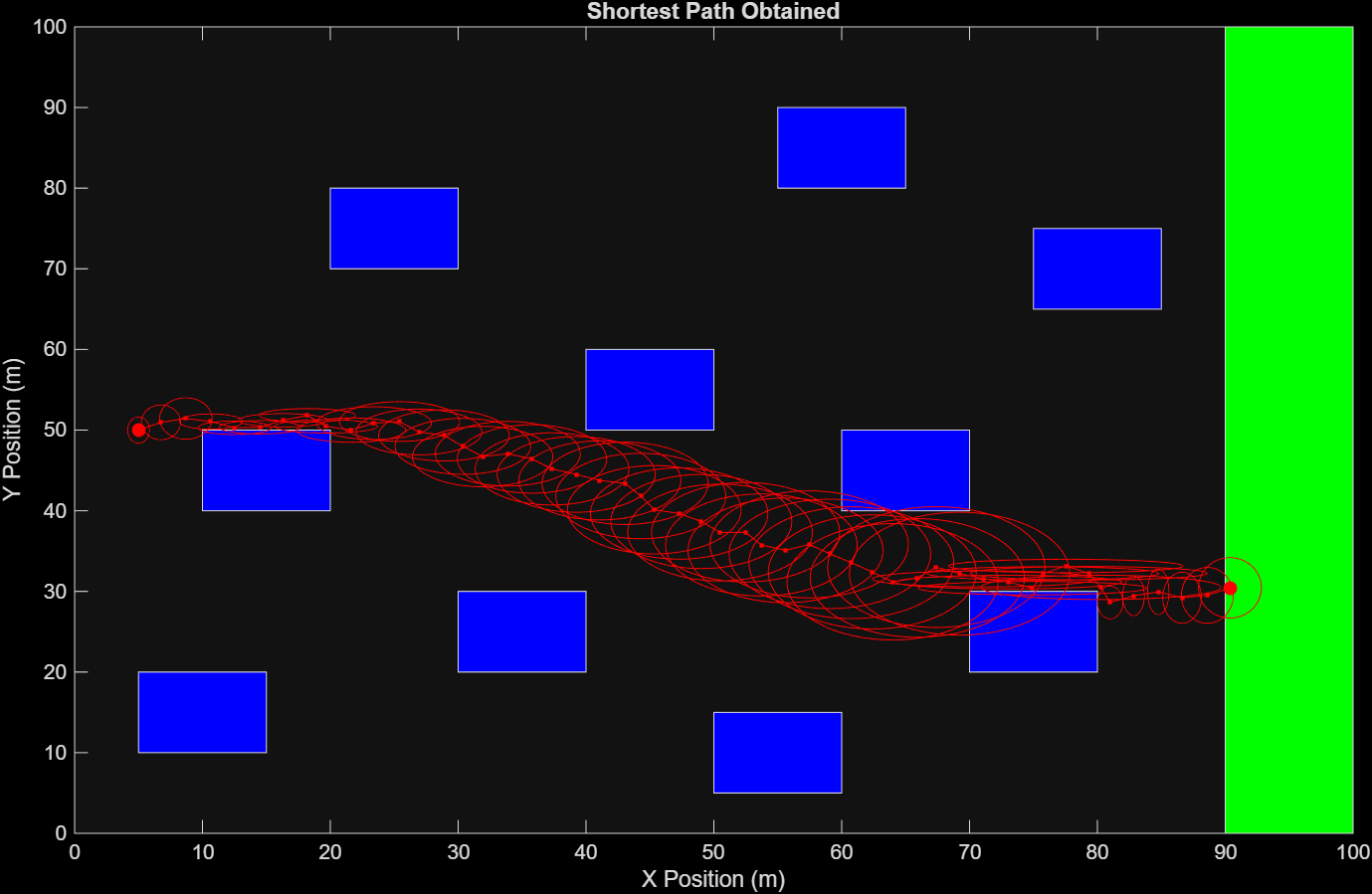
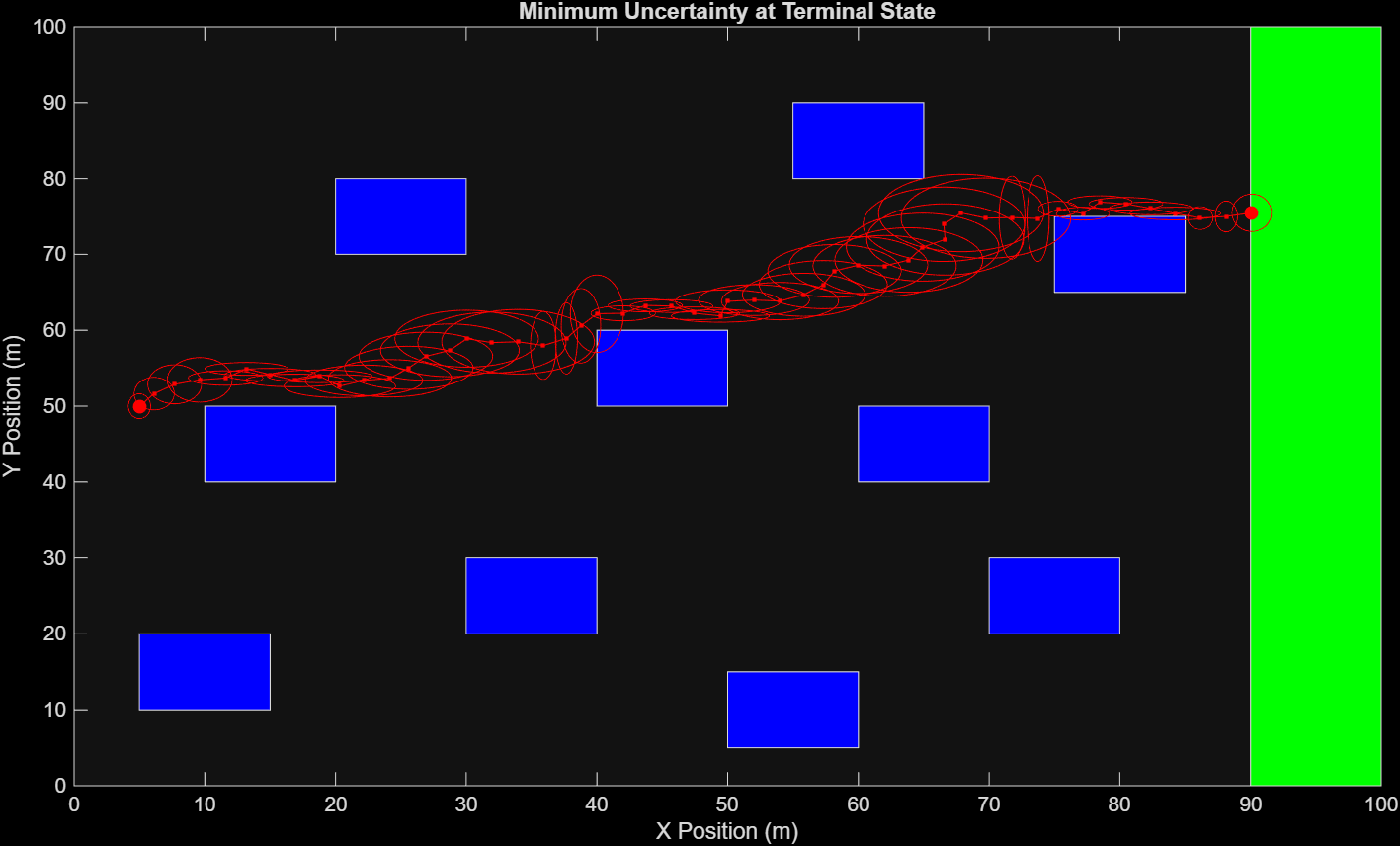
- 02Implemented a Kalman Filter framework to propagate localization uncertainty along each trajectory using a state-space model.
- 03Designed an adaptive sensing/measurement model that varies observability based on proximity to obstacles, linking environment geometry to estimation accuracy .
- 04Ran large-scale simulations (20,000 paths) to analyze tradeoffs between path length, uncertainty, and collision risk, with visualization using uncertainty ellipses.
Visual Documentation