- 01
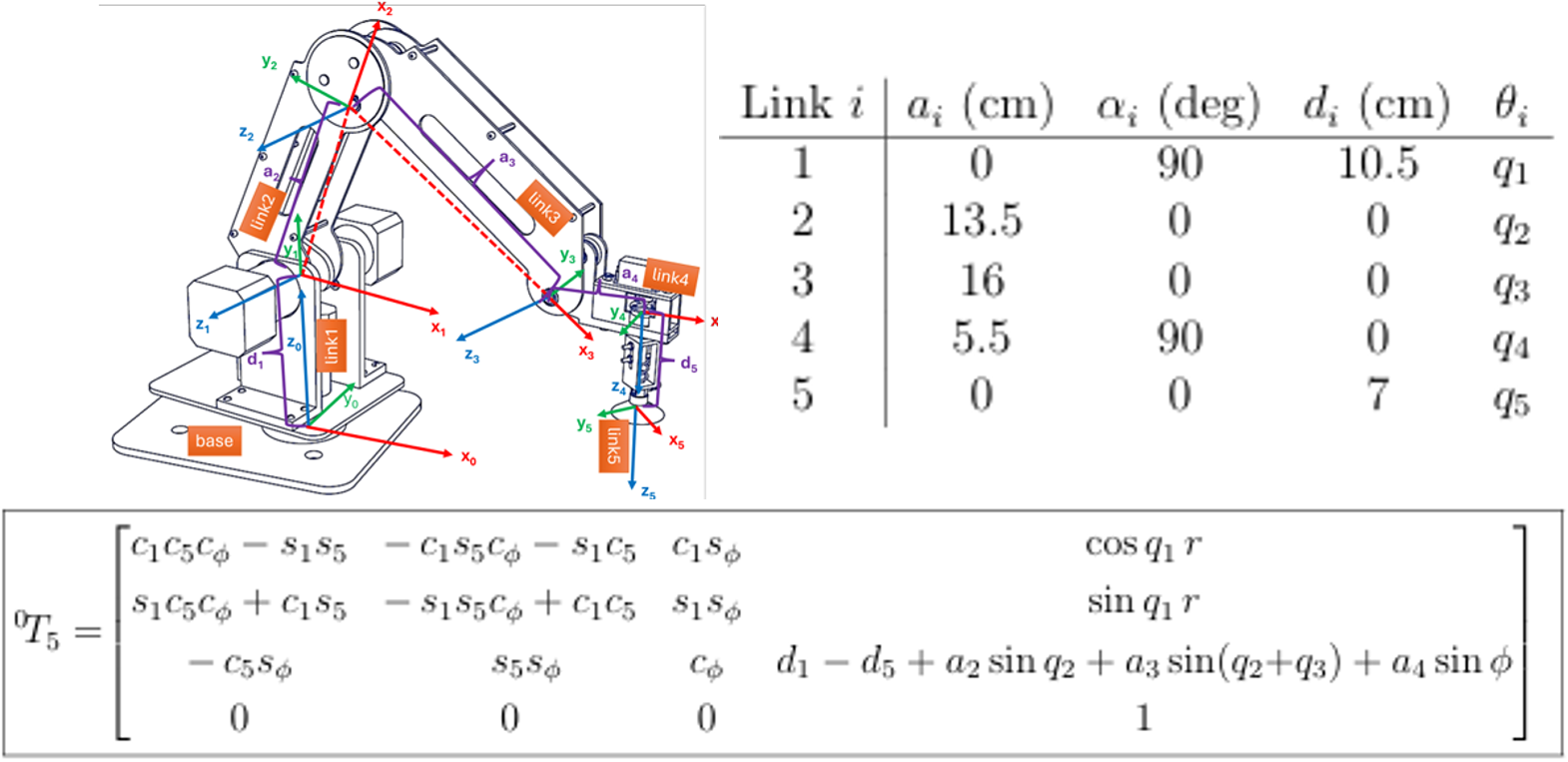
Kinematic Modeling: Derived coordinate frames and transformation matrices utilizing the industry-standard Denavit-Hartenberg (DH) convention to map the robot's joint space to 3D Cartesian space.
- 02
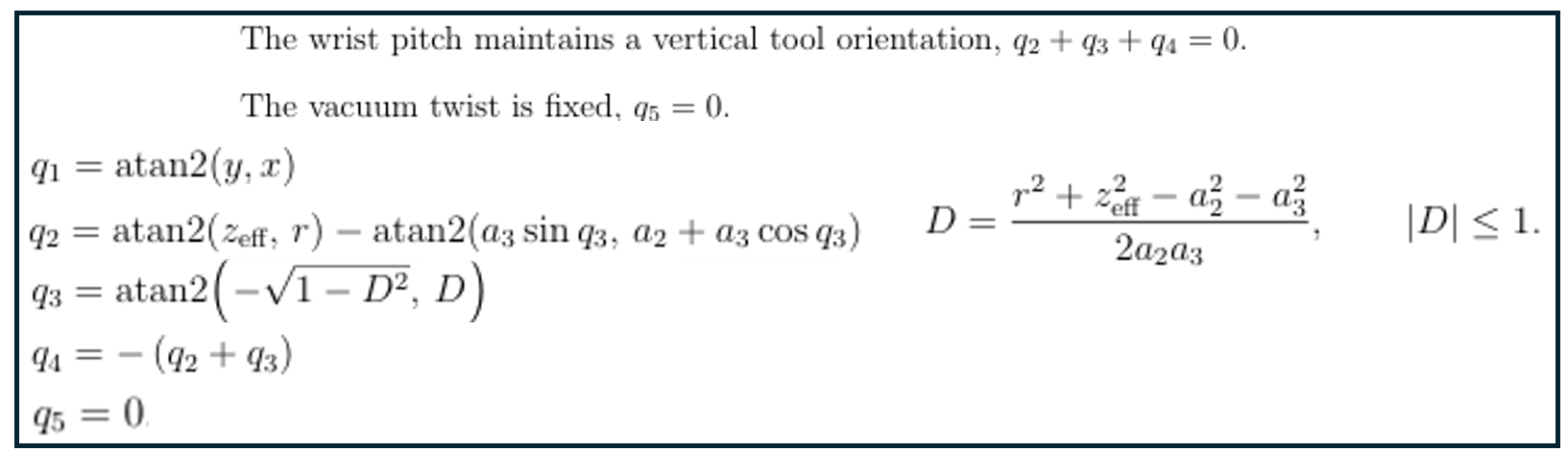
Custom MATLAB Algorithms: Programmed computationally efficient Forward and Inverse Kinematics (IK) solvers. The IK solver accurately calculated the required joint angles to reach desired coordinates while enforcing strict mechanical constraints (e.g., keeping the end of arm tooling perfectly vertical: (q2 + q3 + q4 = 0).
- 03
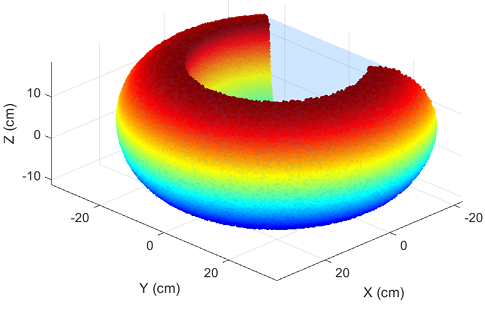
3D Workspace Analysis: Generated 3D point-cloud visualizations of the robot's physical reach by simulating 100,000 randomized joint configurations, strictly bounded by the robot's physical joint limits.
- 04
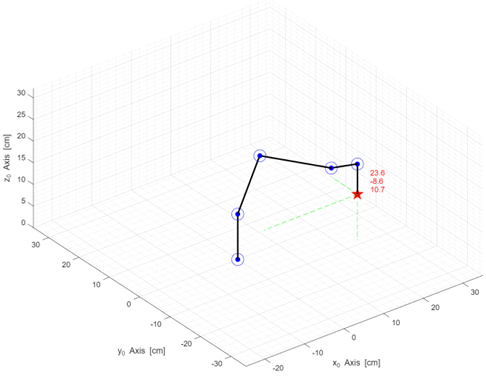
Validation & Error Handling: Validated analytical models against a provided numerical simulator. Integrated robust error handling to automatically flag coordinate inputs that fell outside the physical workspace or violated mechanical joint limits.