Key Engineering Contributions
- 01Mechanical Design & Prototyping: Iterated the mechanical assembly in SolidWorks, optimizing the multi-jointed design for weight and functional grip. Utilized additive manufacturing to produce 3D-printed prototypes for rapid hardware testing and design validation.
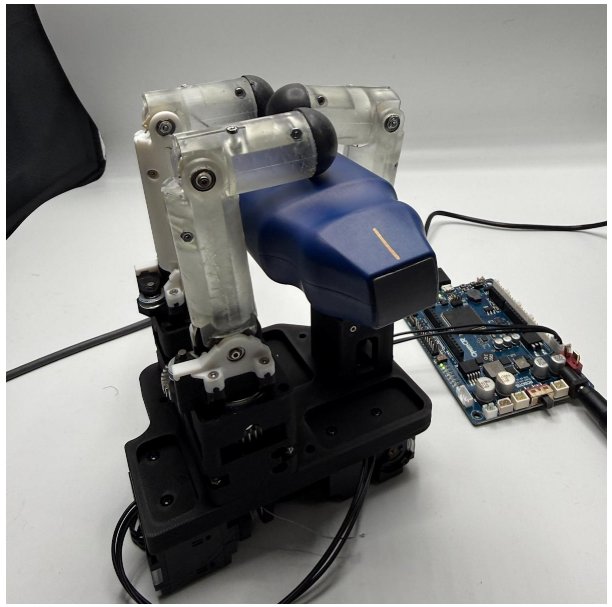
- 02Hardware & Systems Integration: Configured the physical hardware architecture, bridging high-torque Dynamixel servo motors with an OpenCR microcontroller. Establishing the foundational motor control using while supporting the system's broader ROS 2 integration for high-level communication.
Visual Documentation