- 01
Kinematic Modeling: Computed virtual joint centers (e.g., pelvis and hip joint centers) from raw 3D spatial marker coordinates to establish anatomical reference frames.
- 02
Coordinate Transformation: Derived and applied analytical rotation matrices to continuously map the relative orientation between the pelvis and thigh coordinate systems.
- 03
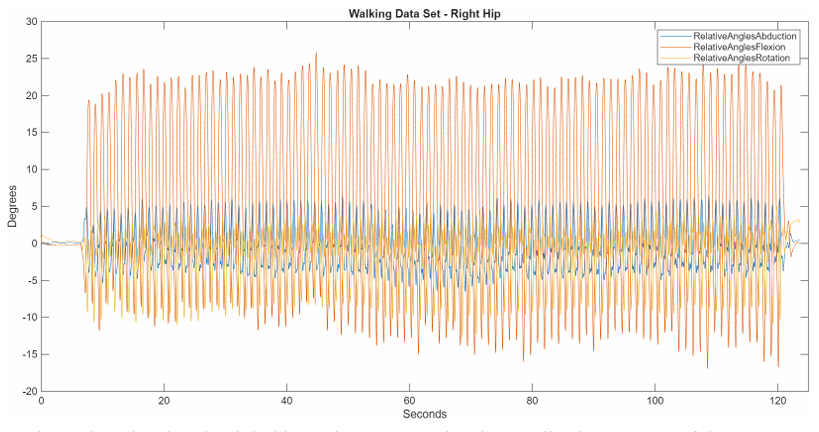
Euler Angle Decomposition: Programmed custom MATLAB algorithms to mathematically decompose the rotation matrices into clinically relevant Euler angles (flexion/extension, adduction/abduction, internal/external rotation).
- 04
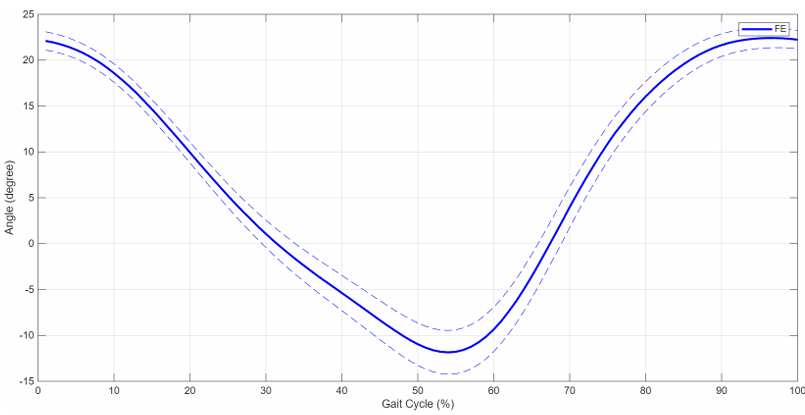
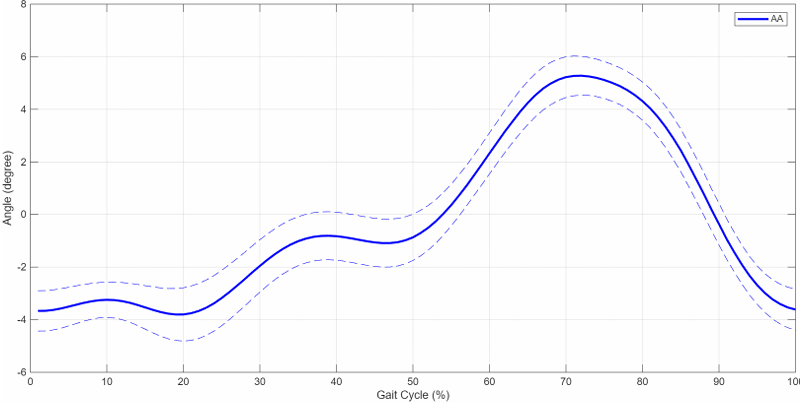
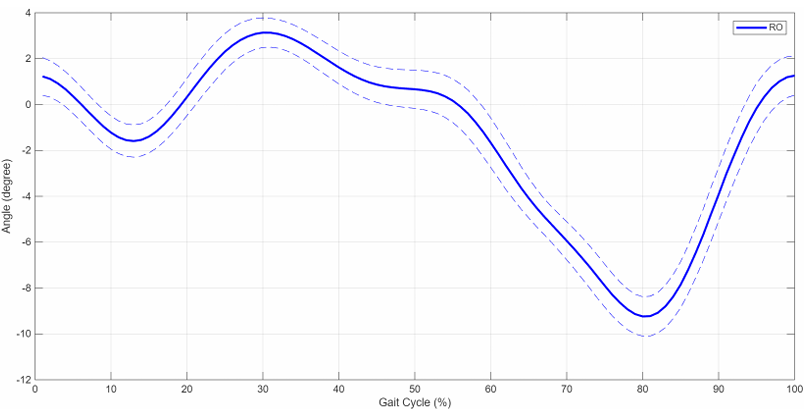
Gait Cycle Analysis: Segmented and normalized the continuous time-series kinematic data to represent 0-100% of the human gait cycle, producing standardized biomechanical performance plots.