Key Engineering Contributions
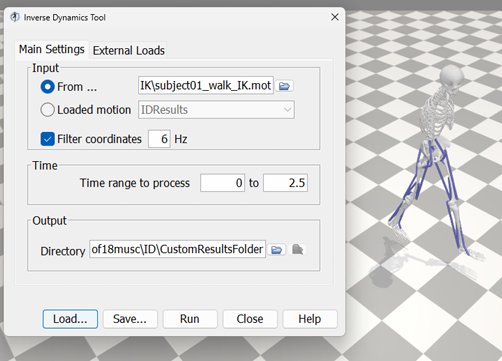
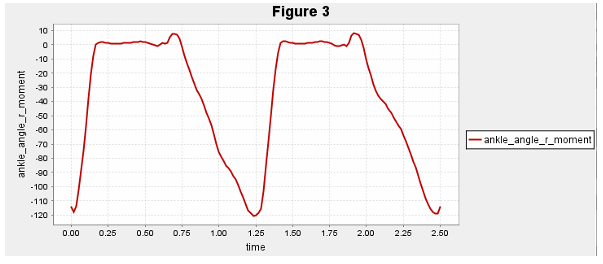
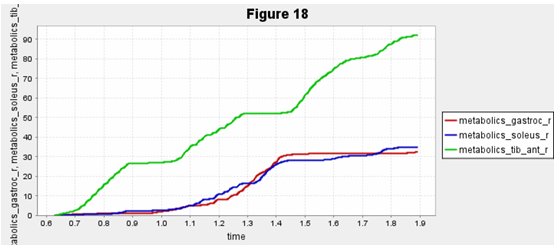
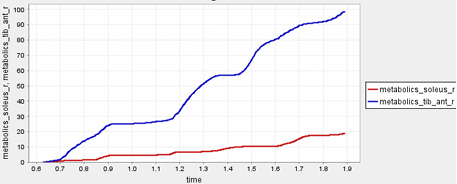
- 01Musculoskeletal Modeling: Conducted Inverse Dynamics (ID) analysis on a 10-DOF, 18-muscle human gait model to calculate lower-limb joint torques and establish baseline metabolic costs for key muscles (e.g., soleus, tibialis anterior).
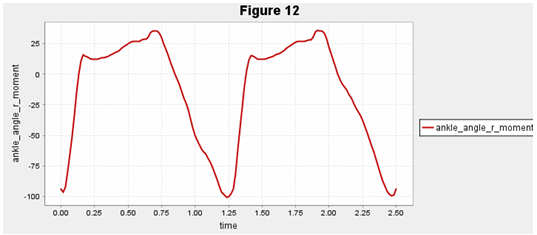
- 02Wearable Device Integration: Simulated the integration of both passive (spring-damper) and active (PlantarFlexAssist) assistive devices directly into the human gait model to observe their impact on joint kinematics and muscle exertion.
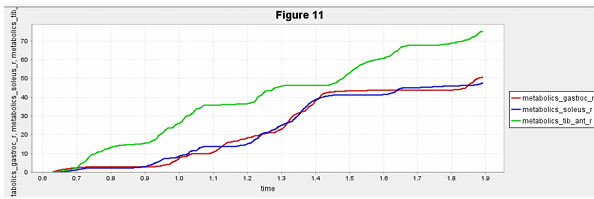
- 03Metabolic Cost Reduction: Iteratively tuned the active actuator's optimal force scaling, successfully reducing the integrated metabolic cost of the soleus muscle to a highly efficient target of ~15 J over a single gait cycle.
Visual Documentation