- 01
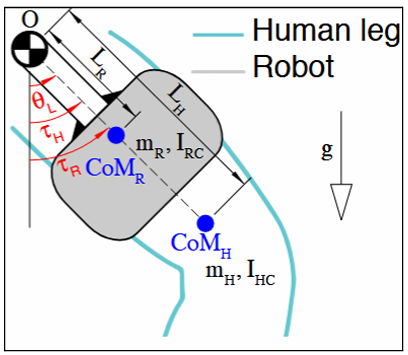
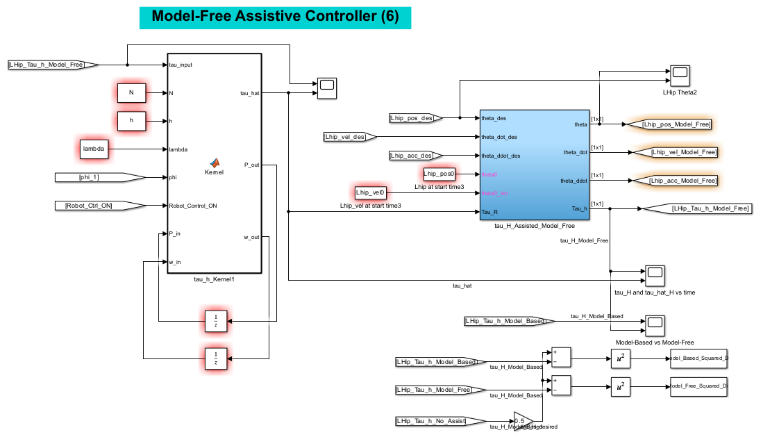
Control System Integration: Analyzed a provided Simulink baseline simulation of human gait dynamics and successfully integrated custom controller subsystems to assist the simulated treadmill walking trajectory.
- 02
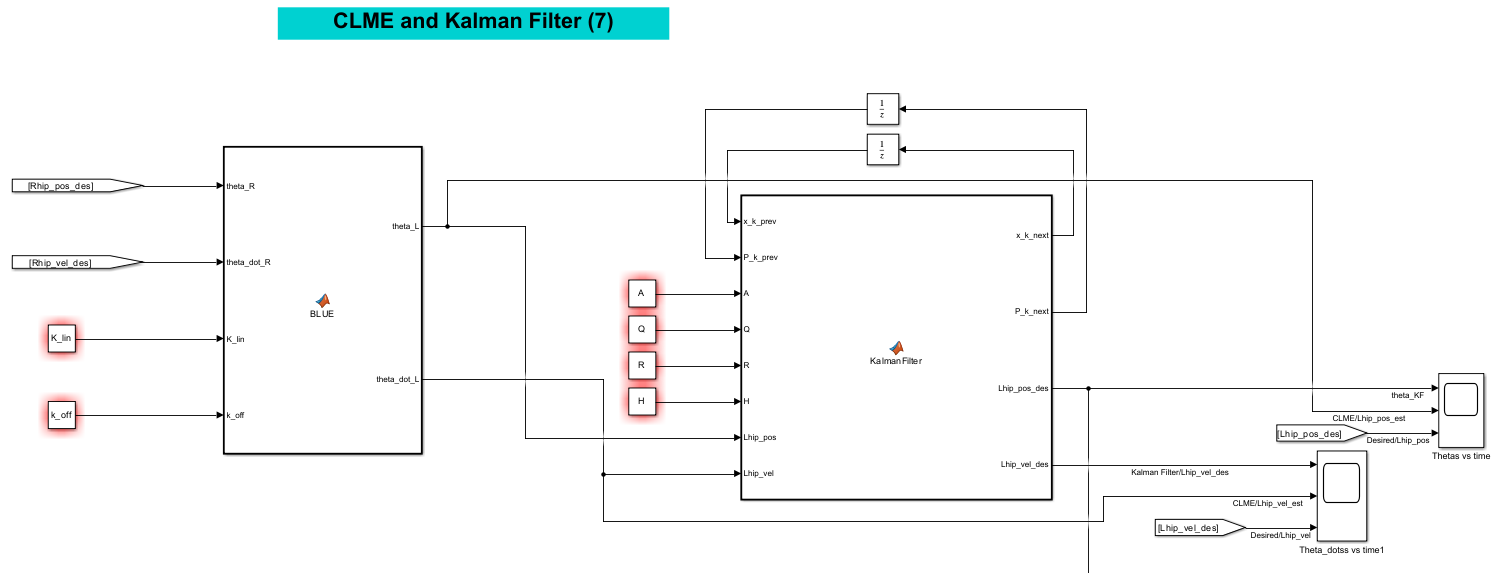
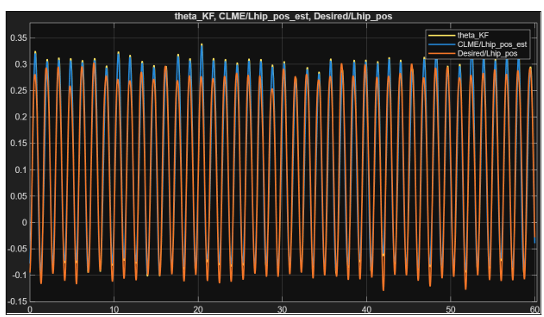
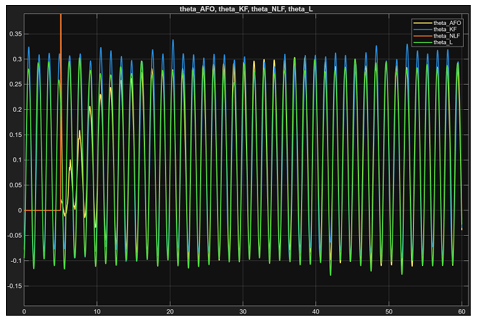
State Estimation & Filtering: Utilized Best Linear Unbiased Estimators (BLUE) to process baseline kinematic data and implemented a Kalman Filter to estimate hip trajectories under noisy biomechanical conditions.
- 03
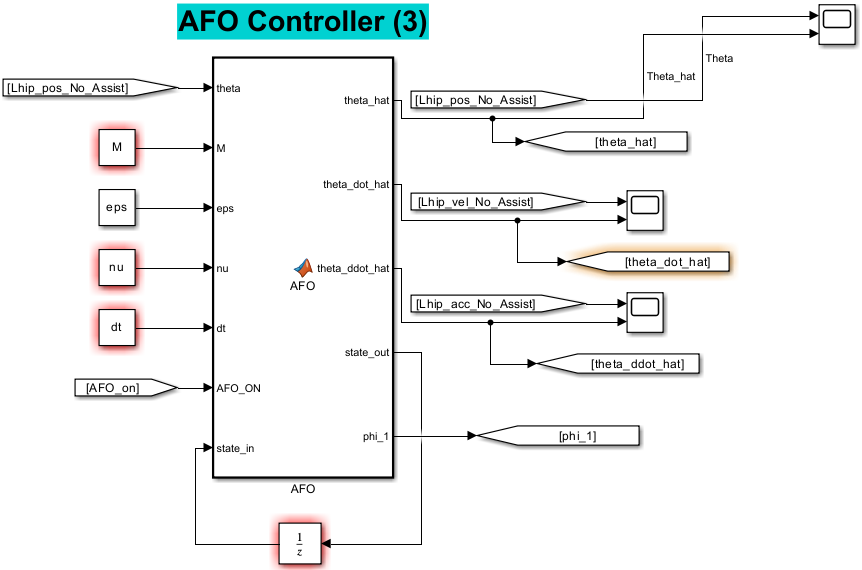
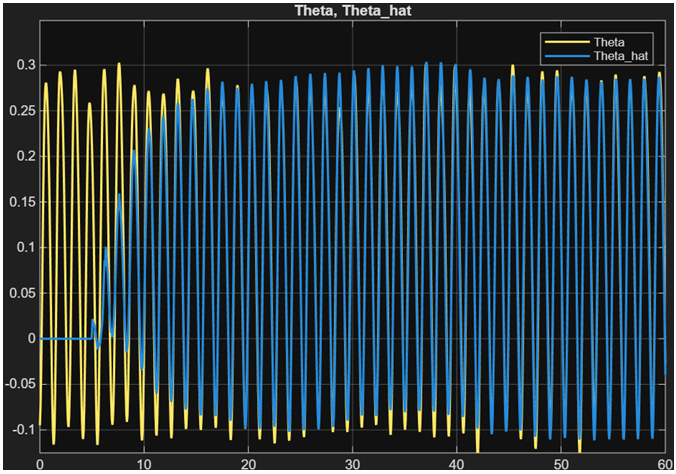
Adaptive Control Design: Formulated the initial conditions and tuned an Adaptive Frequency Oscillator (AFO) control scheme to actively synchronize with the user's rhythmic gait and provide real-time assistive torque.
- 04
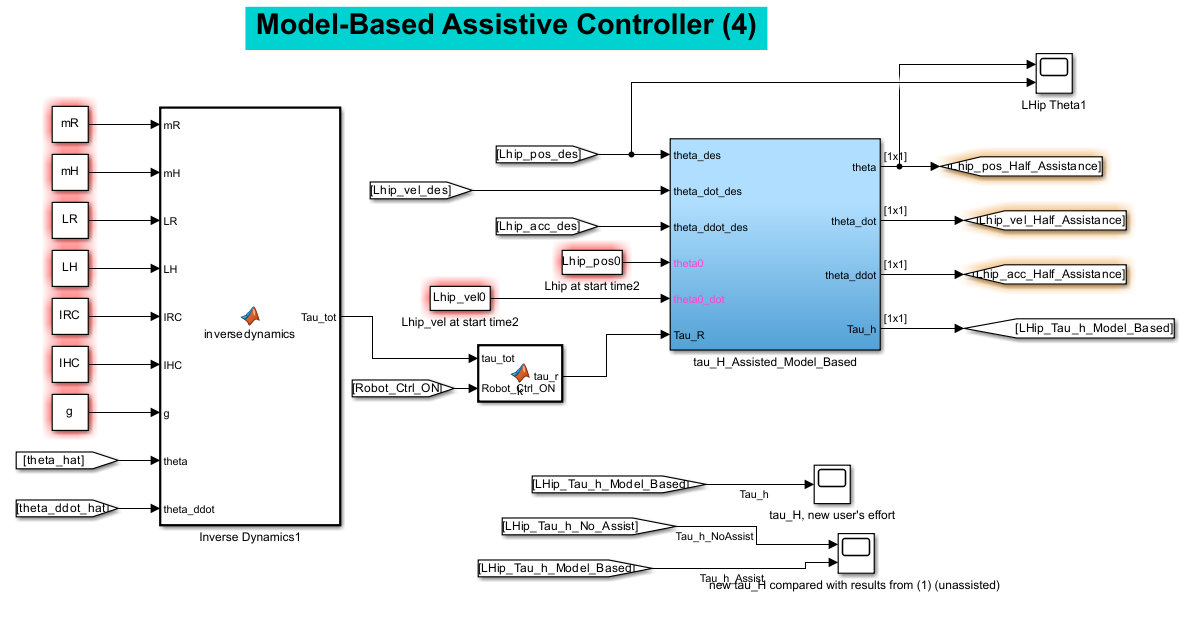
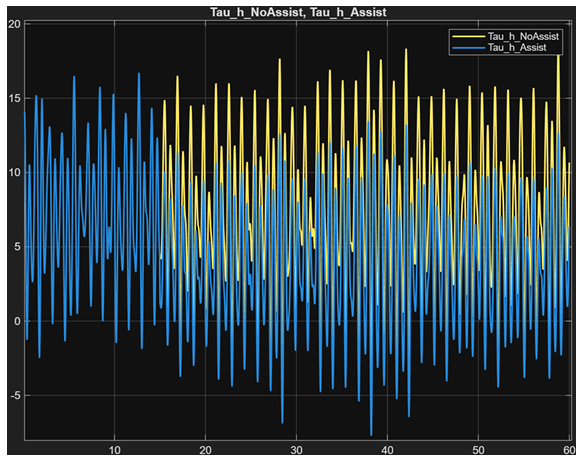
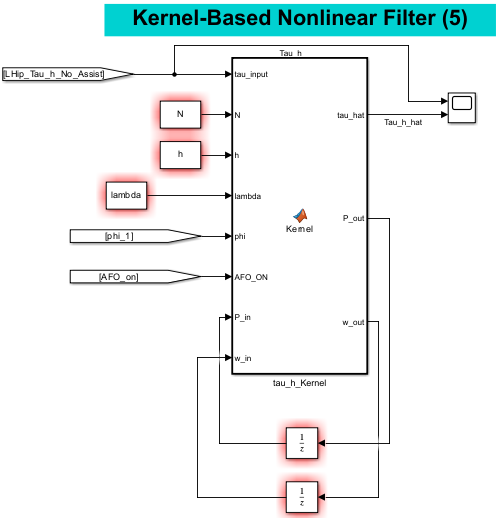
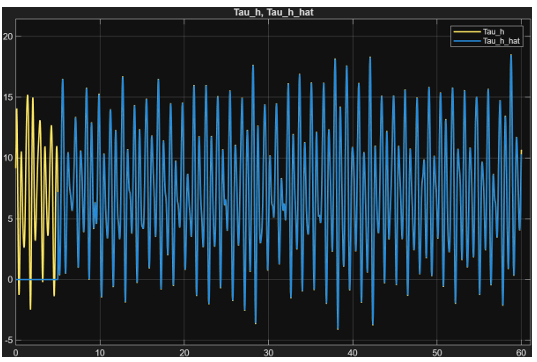
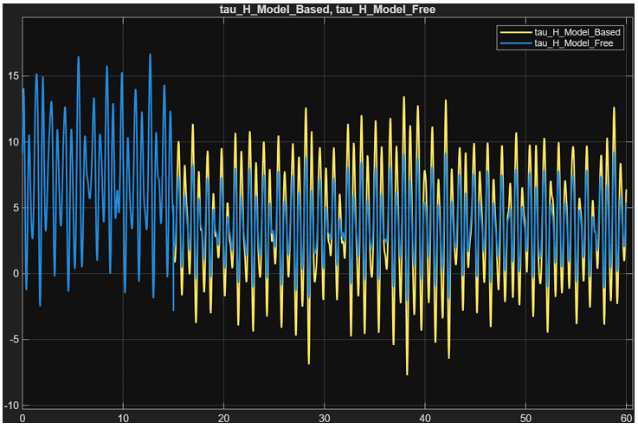
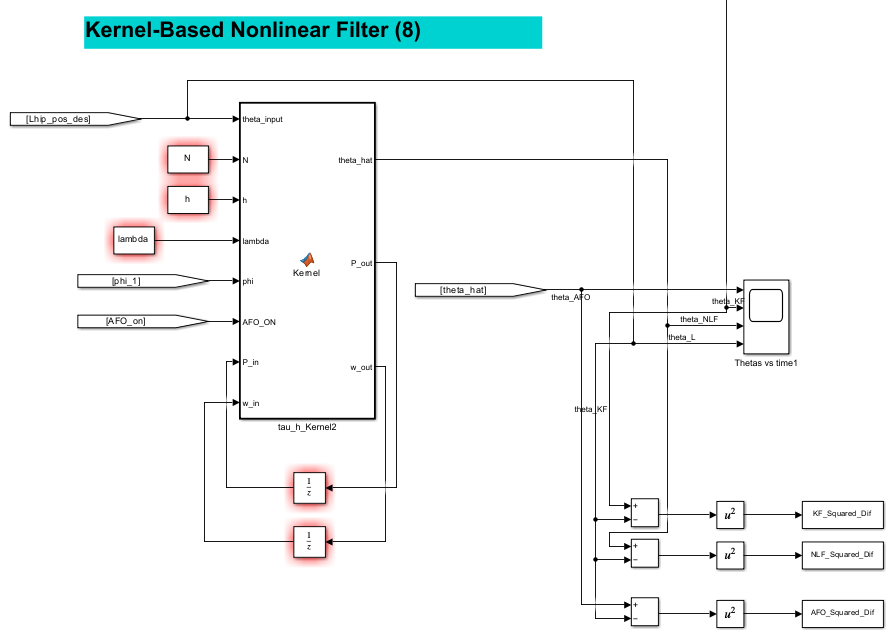
Advanced Nonlinear Control: Engineered a custom Kernel-Based Nonlinear Filter (NLF) that successfully outperformed the traditional linear estimators, achieving the highest tracking accuracy with a Root Mean Square (RMS) error of just 0.0178.